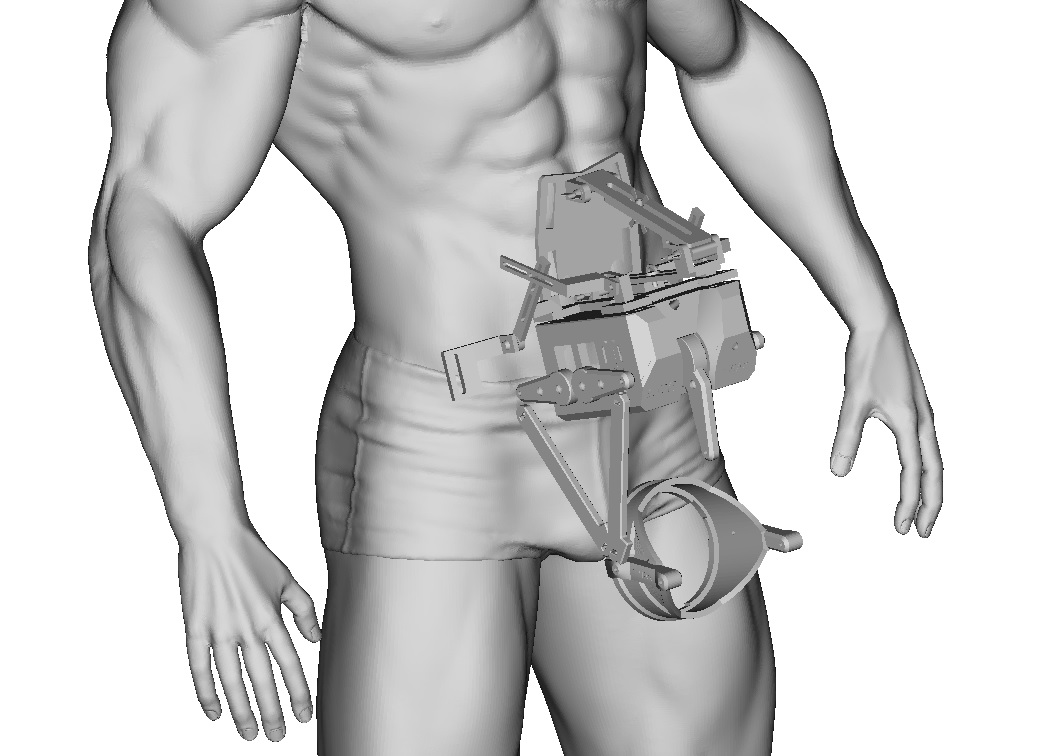
OSR2 SR6 で使えるボディマウントV2.2、VESA 100mm x 100mmアタッチメントです。
(SSR1、2用のボルト穴もVESAアタッチメント板には開けていますが、機種を分解し、よい位置にM4穴を開ける必要があるはずです)
組み立てには100均で買える六角レンチセットを用意してください。
同梱部品一覧
VESAアタッチメント板
安定化脚 左右 各1
脚固定補助柱 × 2
支え柱 ×2
左右連結部品(使用しなくてもかまいません)
ボディー・プレート ×1
吊り下げ板(軸受け取付用)
上部支え板 大中小 各1
M4ボルト×4 M4ナット×4 ストローカーロボット取り付け用
(SR6にはM4ナット本体組み込み済)
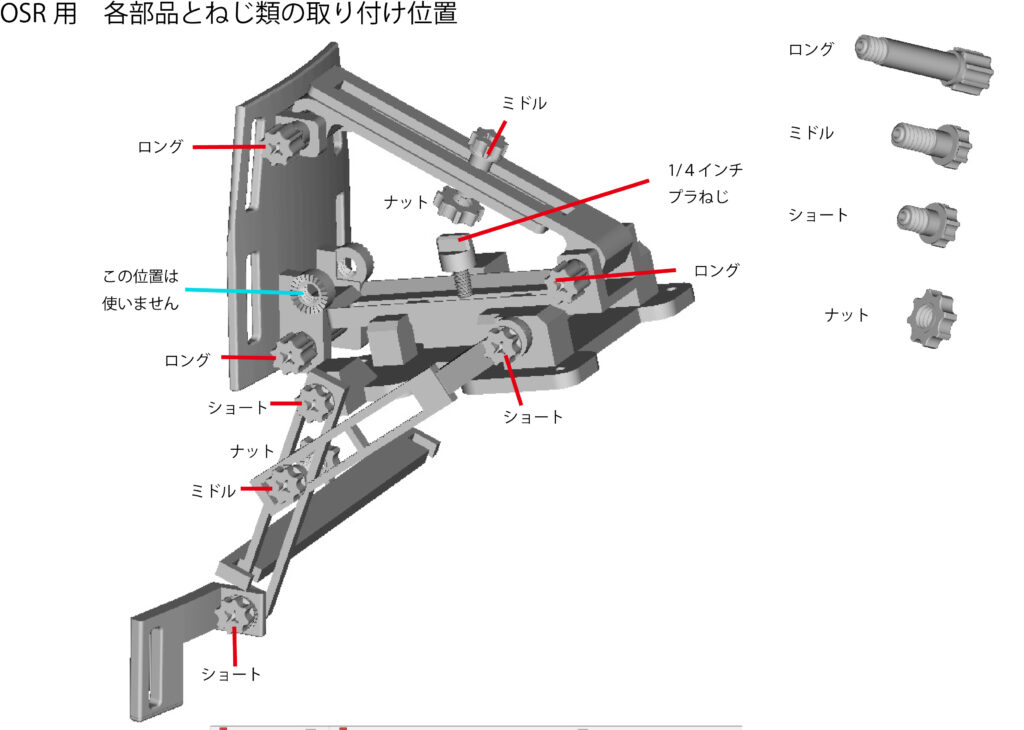
プラねじ
ロング×3
ミドル ×3 ナット×3
ショート×6
1/4インチ 金属またはプラねじ
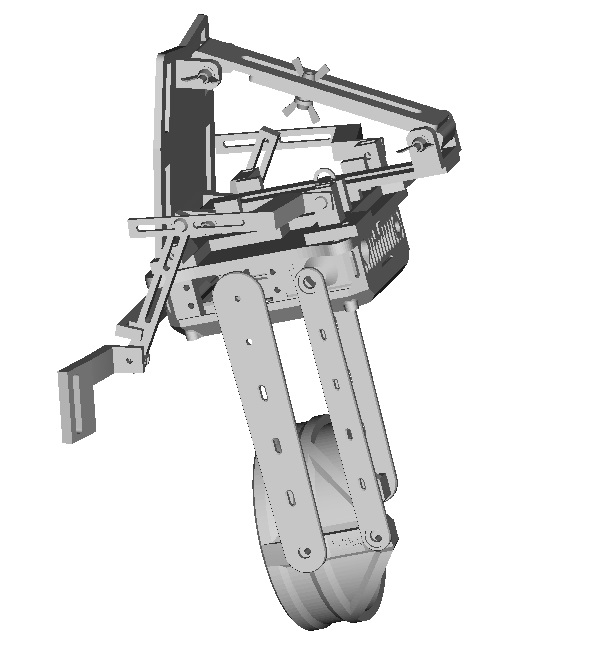
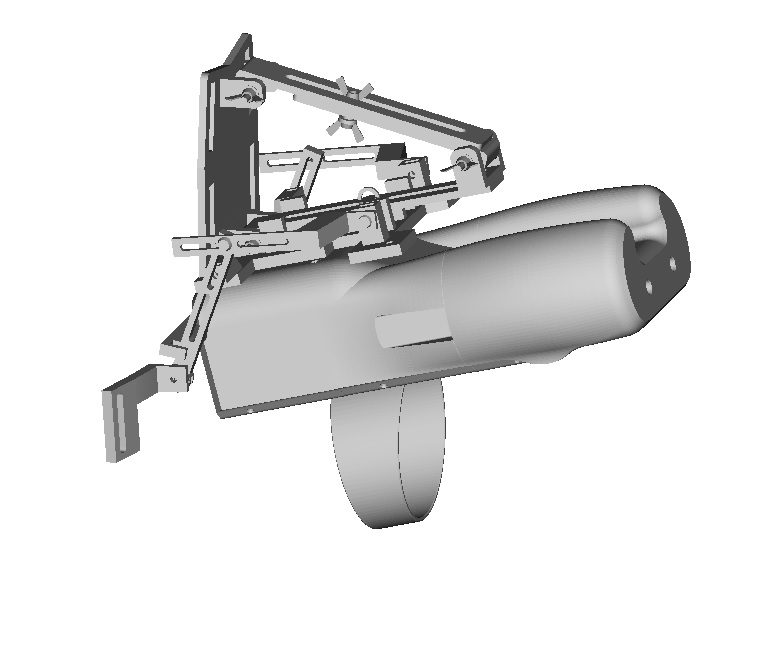
※下記画像を参考に組み立ててください。各ねじ類は反対側省略していますが同様です。
① ロングプラねじの先端から補強用のM3ボルトを六角レンチを使い、埋め込んでください。
あらかじめ埋め込んでいる場合もあります。
上記画像を参考に組み立ててください。
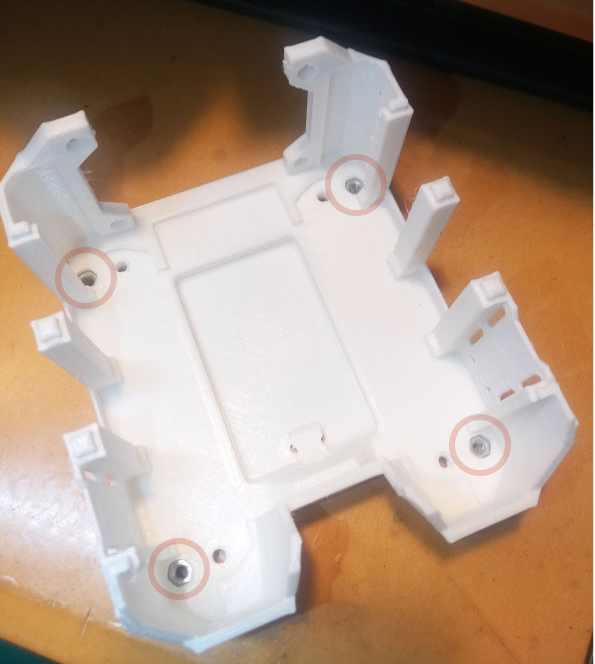
②準備 通常はSR6の四隅にナットが埋め込まれているはずです。
もし、埋め込まれていない場合はボディを分解し、下記写真、内面の赤丸位置にM4ナット×4を埋め込みます。M4ボルトを外側から入れて、ナットを締めて埋め込みます。
四カ所にナットを埋め込んだら、元通りにボディを組み立てます。配線等が外れないよう注意。
③各ストローカーロボットをアタッチメントにM4ボルト・ナットを使って固定。
SSR1は要分解。
④各つまみボルトを調整して、あなたのお好みの位置にしてください。

現状 旧型SR1のボルト穴に対応。SR1新型や別メーカー購入品の場合は現物合わせで4mm穴を開けることで取り付けできるはずです。当店では確認は取れていません。ご了承願います。


コメント